
8K

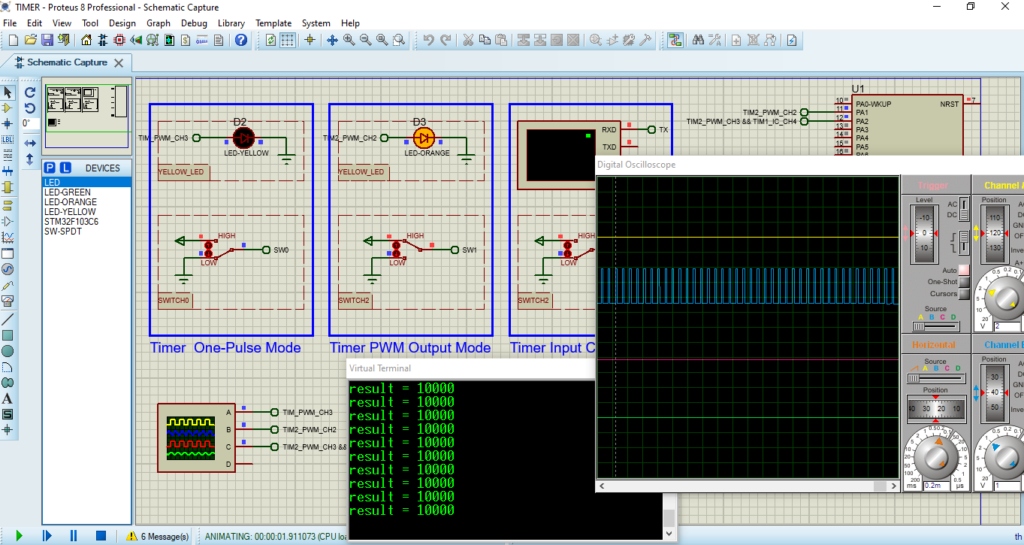
Table of Contents
STM32CubeMX Configuration:
- Open CubeMX & Create New Project Choose The Target MCU STM32F103C6 & Double-Click Its Name
- Go To The Clock Configuration & Set The System Clock To 60MHz
Configuration for the TIMER One-Pulse Mode:
- In the Categories tab, select the TIM3 then (enable Internal Clock & One Pulse Mode & PWM Generation Channel 3)
- In the Parameter settings tab, set the (Prescaler = 6000 & Counter Peroid = 10) The purpose of this settings is to generate a periodic time event with a 1ms interval which represents the length of the pulse.
- In the PWM Generaion Channel 3, set the (Mode = PWM mode 2 & Pulse 2=1)
- In the NVIC setting tab, Enable TIM3 global interrupt
Configuration for the TIMER PWM Output Mode:
- In the Categories tab, select the TIM2 then (enable Internal Clock & PWM Generation Channel 3 and 4)
- In the Parameter settings tab, set the (Prescaler = 60 & Counter Peroid = 100)
Configuration for the TIMER Input Capture Mode:
- In the Categories tab, select the TIM1 then (enable Internal Clock & Input Capture direct mode Channel 4)
- In the Parameter settings tab, set the (Prescaler =60 & Counter Peroid= 65535)
- In the Inpute Capture Channel 4 set Rising Edge
- In the NVIC setting tab, Enable TIM1 capture compare interrupt
- Generate The Initialization Code & Open The Project In CubeIDE
- Write The Application Layer Code
STM32CubeIDE Configuration:
In file name :main.c
Proteus Configuration :
- Open Proteus & Create New Project and click next

- Click on Pick Device
- Search for STM32F103C6 & SW-SPDT(switch) &LED_RED, ORANGE, YELLO
6 comments
[…] STM32 […]
[…] implement this system, we can use three different methods to read the ADC result and set the PWM duty cycle using ADC Polling, Interrupt, and DMA modes […]
[…] with the HX711 load cell, ensuring accurate weight measurement. We’ll then enable the TIM1 timer to create precise microsecond delays for the HX711 communication protocol, crucial for […]
[…] Pulse Width Modulation (PWM) is a method used to create analog signals from digital sources by adjusting the duration of pulses […]
[…] learn how to control servo motors using STM32 microcontrollers by utilizing Pulse Width Modulation (PWM) to achieve precise positioning. Servo motors are crucial components in robotics and automation due […]
[…] your firmware, configure the GPIO pins as outputs and utilize Pulse Width Modulation (PWM) for speed control. This configuration allows efficient management of the motor’s direction […]