
Table of Contents

In this project, we delve into the seamless integration of the HC-SR04 ultrasonic sensor with STM32 microcontrollers, leveraging the advanced Timer functionality offered by the STM32 series. By harnessing the capabilities of STM32’s Timer peripherals, developers can significantly enhance the accuracy and efficiency of distance measurement applications. This article explores the comprehensive process of integrating the HC-SR04 sensor with STM32 microcontrollers, focusing on optimizing sensor performance through precise Timer control.
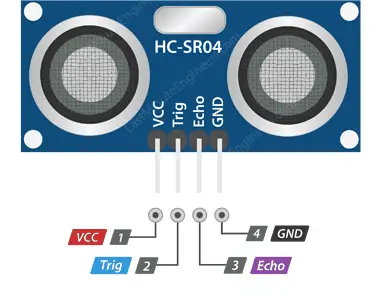
HC-SR04 Pinout
The pin configuration of the HC-SR04 sensor encompasses VCC, Ground, Trigger, and Echo pins. VCC and Ground serve to power the sensor, requiring a 5-volt supply for VCC and grounding for stable operation. The Trigger pin, functioning as an input, initiates distance measurement upon receiving a 10 µs pulse. Conversely, the Echo pin, an output, generates pulses whose width corresponds to the distance between the sensor and the detected obstacle.
How the HC-SR04 Ultrasonic Distance Sensor Works?
The HC-SR04 Ultrasonic Distance Sensor emits 40,000 Hz ultrasound waves, which bounce back if obstructed, allowing distance calculation based on the speed of sound.
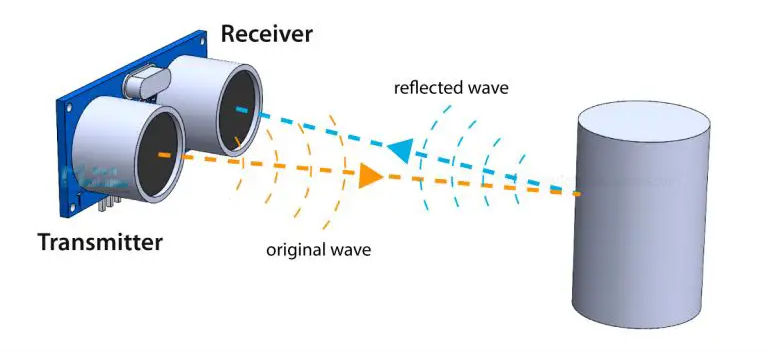
To initiate the ultrasound burst, the Trig pin is set to a High State for 10 µs. Subsequently, the Echo pin detects reflections and remains High until the echo is received or times out after 38ms.
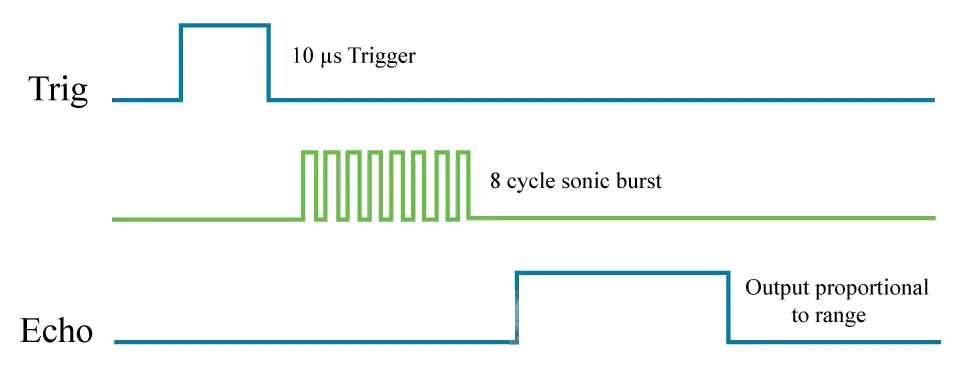
Distance calculation is achieved using the formula Distance = (Speed x Time) / 2, where Time represents the duration the Echo pin remains High. This value, when multiplied by the speed of sound and divided by 2, yields the distance from the sensor to the object, enabling efficient obstacle detection in various applications.
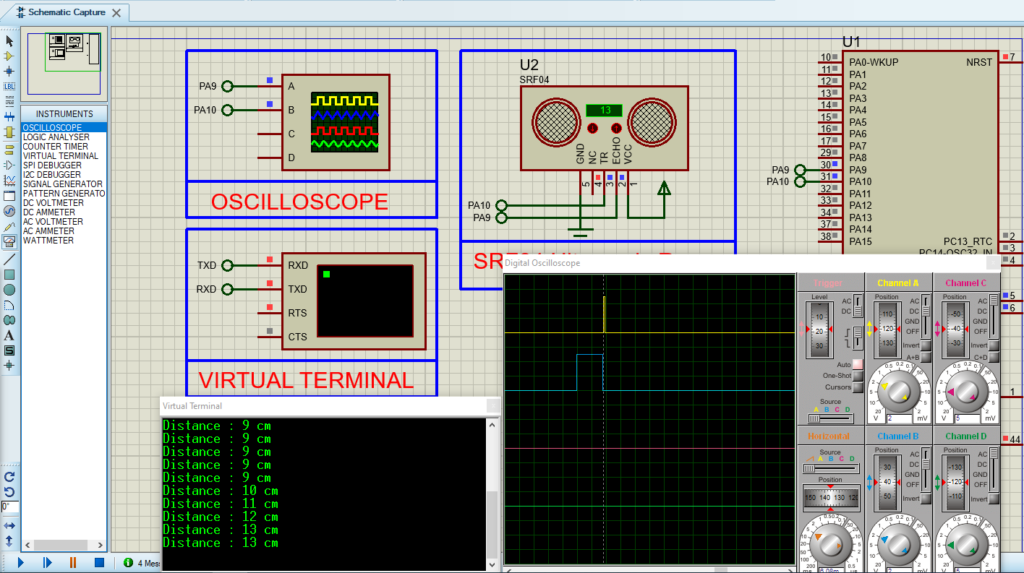
To commence this project, we’ll initially activate TIMER1 in input capture direct mode. Following this, we’ll configure PA10 as the output TRIGER_PIN. Finally, we’ll establish UART communication to transmit both the ultrasonic value readings and system status.
Proteus Configuration :
- Open Proteus & Create New Project and click next

- Click on Pick Device
- Search for STM32F103C6 & SRF04
5 comments
> Configure The GPIO Pins PB10 as Output Pin
Should be PA10
Thank you for pointing that out. I appreciate your attention to detail, and I will make the correction immediately.
thanks you for website
You’re welcome! I’m glad you found the website helpful. If you have any more questions or need further assistance, feel free to reach out!
[…] Ultrasonic ranging module HC-SR04 offers non-contact distance measurement from 2 cm to 400 cm with an accuracy of 3 mm. Featuring ultrasonic transmitters, receivers, and a control circuit, it calculates distances based on the time interval between the transmitted ultrasonic waves and their echoes. Operating at 5V DC, it is highly efficient, compact, and suitable for applications requiring precise and reliable distance sensing.If you’d like to learn more about this sensor and explore additional projects using other microcontrollers, check out the article STM32 Ultrasonic Sensor. […]