
885

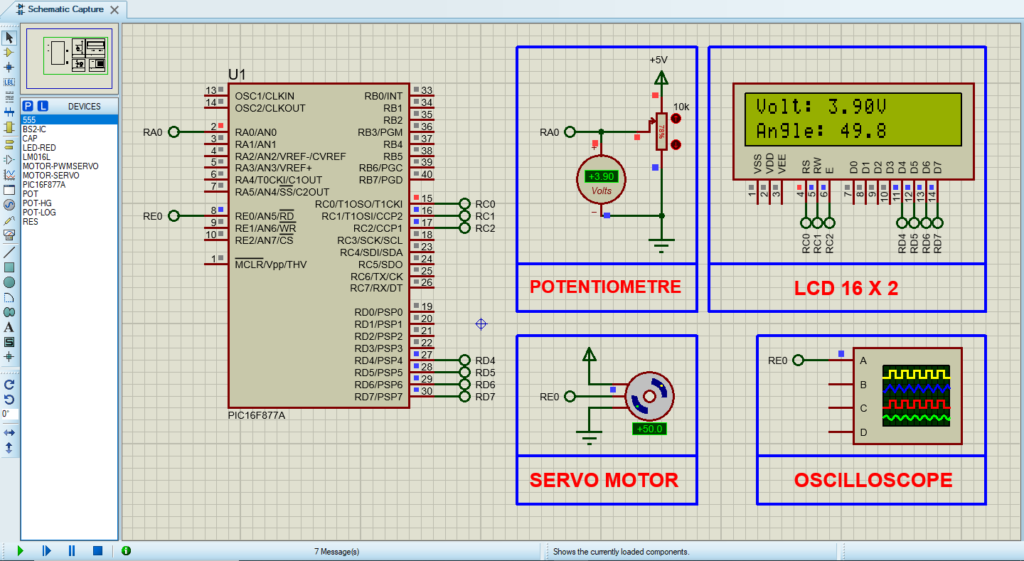
Table of Contents
1 comment
[…] and precise motor control applications. This project builds upon my previous work, ‘PIC16F877A Servo Motor Control‘, where I demonstrated basic servo […]