
Table of Contents
UART and USART: Understanding the Differences:
UART and USART are two essential components in serial communication, each with its own characteristics: UART: Stands for Universal Asynchronous Receiver/Transmitter. It functions as a standalone entity, suitable for low-speed applications.
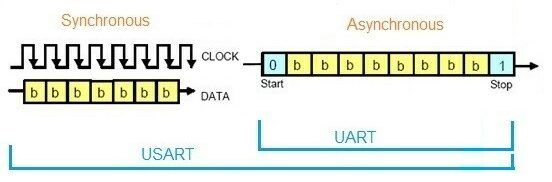
UART employs a locally generated clock, making it energy-efficient. USART: Signifies Universal Synchronous/Asynchronous Receiver/Transmitter. Unlike UART, USART supports various protocols, enabling high-speed communication. It utilizes a transmitter-generated clock but tends to consume more energy compared to UART setups.
Using UART with Microcontrollers:
The PIC16F877 UART is an essential component for serial communication, efficiently transmitting and receiving data while prioritizing the LSB (Least Significant Bit) first. This hardware-independent system ensures seamless operation by adhering to consistent data formats and baud rates. At the heart of the PIC16F877 UART functionality lies the baud rate generator, which is configurable for either x16 or x64 bit shift rates based on the BRGH bit. While hardware support for parity is absent, software implementation of the ninth data bit compensates for this limitation. Notably, asynchronous mode ceases operation during Sleep mode, ensuring energy efficiency
The UART Asynchronous module comprises vital components:
- Baud Rate Generator
- Sampling Circuit
- Asynchronous Transmitter
- Asynchronous Receiver
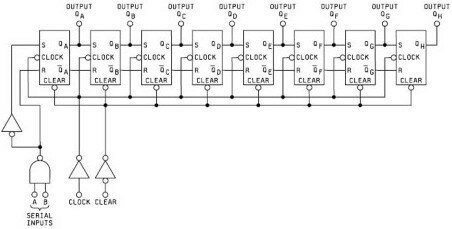
The transmitter’s core functionality revolves around the Transmit (Serial) Shift Register (TSR), which acquires data from the Read/Write Transmit Buffer (TXREG). Software intervention is necessary to load data into the TXREG register, ensuring a smooth data transmission process. Upon completion of the preceding transmission’s Stop bit, the TSR register loads the new data frame from TXREG, facilitating continuous data transfer. Notably, the TXIF flag bit signifies an interrupt condition, adjustable through the TXIE bit, while the TRMT status bit indicates TSR register emptiness, necessitating manual polling.
![]()
Transmission initiation entails setting the TXEN enable bit, coupled with data loading into the TXREG register and clock generation by the Baud Rate Generator. Flexibility exists for transmission commencement either by loading TXREG first or by simultaneous TXREG loading and TXEN enabling. Disabling TXEN mid-transmission aborts the process, resetting the transmitter and reverting the TX/RC6 pin to High-impedance state.
UART Transmitter Configuration Steps:
- Configure Baud Rate: Initialize the SPBRG register to achieve the desired baud rate, utilizing the BRGH bit for high-speed operation.
- Activate Asynchronous Serial Port: Enable the asynchronous serial port by configuring SYNC and SPEN bits.
- Set Pin Data Direction: Define the data direction for RX and TX pins (RC6/TX/CK and RC7/RX/DT) for UART operation.
- Enable UART Transmission: Activate UART transmission by setting the TXEN bit.
- Load Data to TXREG: Load data into the TXREG register for transmission.
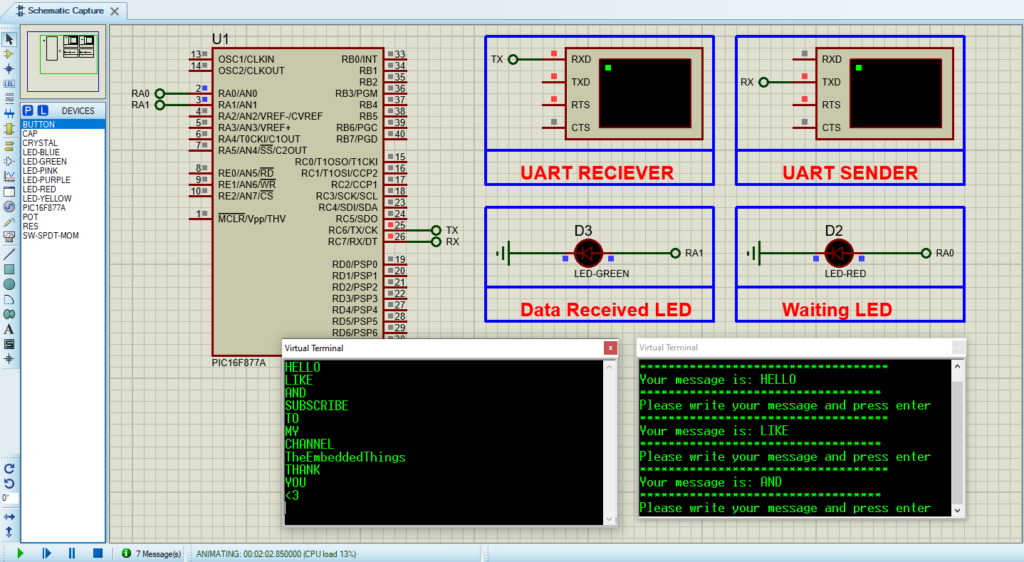
Proteus Configuration :
- Open Proteus & Create New Project and click next

- Click on Pick Device
- Search for PIC16F877A & LED-RED & LED-GREEN
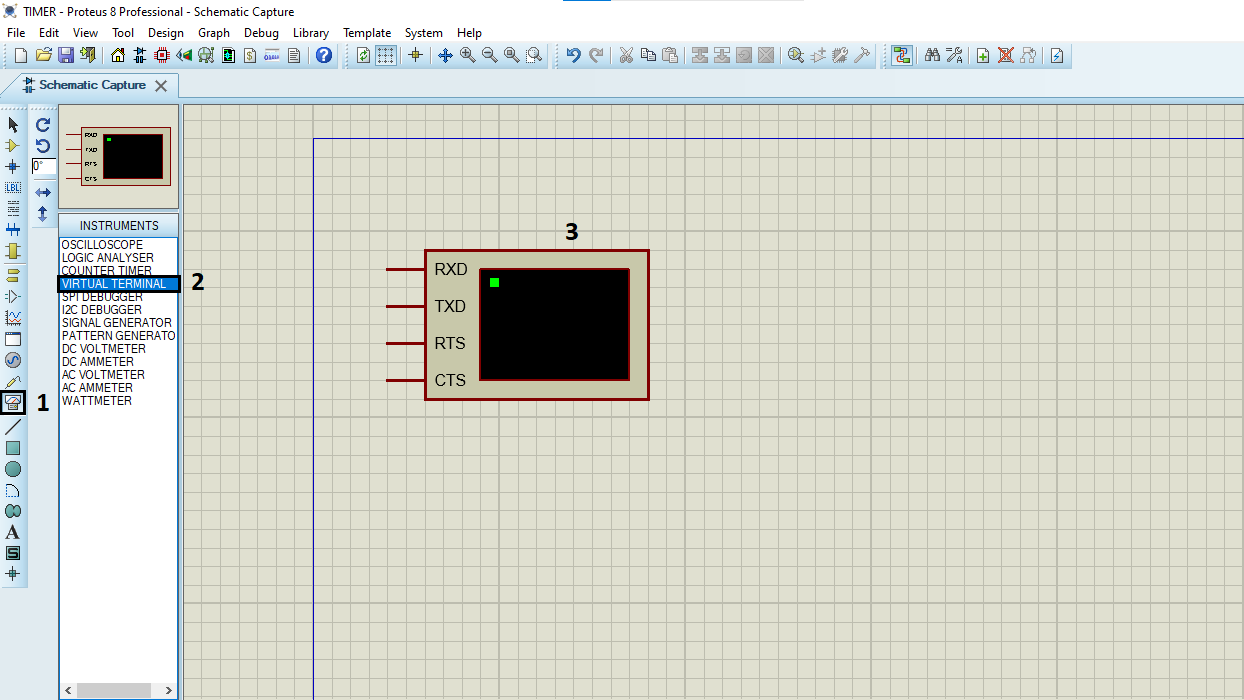
- Click on Virtual Instruments Mode then choose VIRTUAL TERMINAL
 k on Terminal Mode then choose (DEFAULT & POWER &GROUND)
k on Terminal Mode then choose (DEFAULT & POWER &GROUND)
5 comments
[…] of the PIC16F877A microcontroller based on specific time intervals. Additionally, it implements UART communication to send a message periodically via serial transmission. Below is the breakdown of the […]
[…] using I2C communication. The system reads real-time temperature data, which is displayed over UART. Different modes, including Default, Normal, and Safety modes, are implemented, each with […]
[…] via I²C communication. It continuously monitors temperature and transmits data through UART. The system operates in Default, Normal, and Safety modes, with customizable thresholds and alerts. […]
[…] a PIC16F877A microcontroller to measure voltage, current, and power in real-time. The system uses UART communication to display sensor data, including bus voltage, shunt voltage, current, and power, for […]
[…] to measure voltage with high precision. The system uses I2C for communication with the MCP3421 and UART to display the measured voltage in millivolts (mV) on a serial monitor. Below is a detailed […]