
Table of Contents
SPI (Serial Peripheral Interface) is a synchronous serial communication protocol facilitating high-speed data transfer between microcontrollers and various peripheral devices. Its simplicity and effectiveness make it a popular choice for interfacing with components like sensors, memory devices, and displays.
Key Features of SPI::
- Full-Duplex Communication: Simultaneous data transmission and reception.
- High-Speed Data Transfer: Operates at various clock rates, typically from a few kHz to several MHz.
- Minimal Wiring: Typically requires only four lines (MISO, MOSI, SCLK, SS).
- No Unique Addressing: Simple hardware setup without complex addressing schemes.
How SPI Works?:
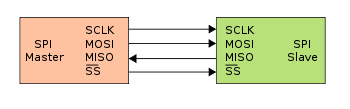
Master and Slave Devices:
- SPI communication involves at least one master and one or more slave devices.
- The master generates the clock signal and initiates data transfers.
Pin Configuration:
- MISO (Master In Slave Out): Data sent from slave to master.
- MOSI (Master Out Slave In): Data sent from master to slave.
- SCLK (Serial Clock): Clock signal generated by the master.
- SS (Slave Select): Signal used by the master to select the slave.
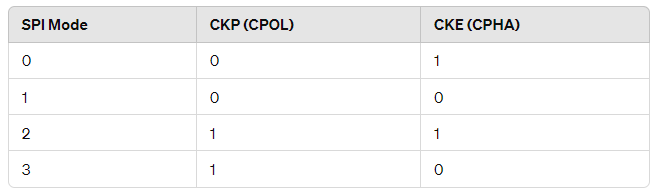
Clock Configuration:
- The clock rate is derived from the system clock and can be adjusted to various frequencies.
- Clock polarity (CKP) and phase (CKE) must be configured according to the slave device’s specifications.
SPI Modes:
The combination of clock polarity and phase results in four possible SPI modes:
SPI Bus Configurations:
SPI devices can be connected in different configurations:
- Daisy Chain: Devices are connected in a circular manner, passing data through each device until it reaches the destination. This configuration uses a single SS line for all devices, simplifying the connection.
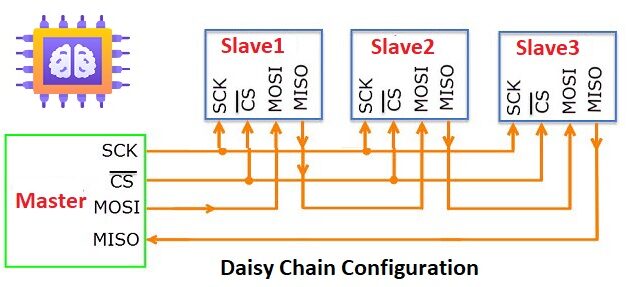
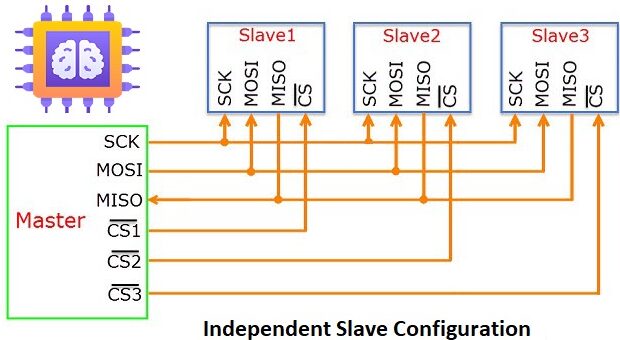
- Independent Slave: Each slave has its own SS line, allowing the master to select each slave independently. This configuration can become impractical with many slaves due to the need for numerous IO pins.
Advantages of SPI:
- Full-duplex communication.
- High-speed data transfer rates.
- Minimal wiring (typically 4 lines).
- Simple hardware setup without the need for unique addresses for slaves.
- Flexible data transfer sizes.
Diadvantages of SPI:
- No hardware acknowledgment from slaves.
- Typically supports only one master device.
- Requires more pins compared to I2C.
- No built-in error-checking.
- Limited to short-distance communications.
Using SPI with Microcontrollers:
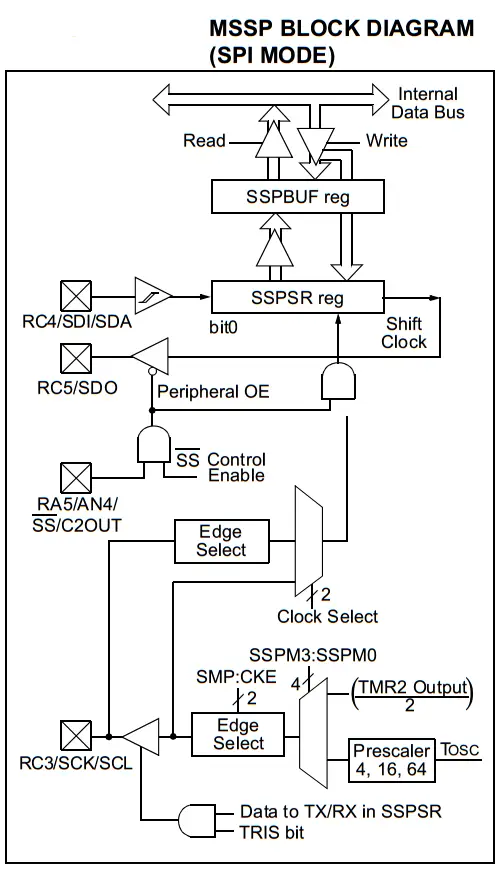
Microchip PIC microcontrollers come equipped with the Master Synchronous Serial Port (MSSP) module, which supports both Serial Peripheral Interface (SPI) and Inter-Integrated Circuit (I2C) modes.
Pin Configuration
SPI allows for synchronous transmission and reception of 8-bit data frames using the following pins:
- Serial Data Out (SDO): RC5/SDO
- Serial Data In (SDI): RC4/SDI/SDA
- Serial Clock (SCK): RC3/SCK/SCL
- Slave Select (SS) (for Slave mode): RA5/AN4/SS/C2OU
Operation
To initialize SPI, configure control bits in the SSPCON and SSPSTAT registers:
To initialize SPI, configure control bits in the SSPCON and SSPSTAT registers:
- Master Mode: Set SCK as the clock output.
- Slave Mode: Set SCK as the clock input.
- Configure the following settings:
- Clock Polarity (CKP)
- Clock Edge (CKE)
- Data Input Sample Phase (SMP)
- Clock Rate (in Master mode)
- Slave Select mode (in Slave mode)
The MSSP module contains a shift register (SSPSR) and a buffer register (SSPBUF). The system shifts data out with the Most Significant Bit (MSB) first, and it stores the received data in SSPBUF. The Buffer Full (BF) bit and the SSPIF interrupt flag indicate the status.
To enable the MSSP serial port, take the following actions:
- Set the SSPEN bit in SSPCON
- Configure TRISx register bits:
- SDI: Controlled by the SPI module
- SDO: Clear TRISC<5>
- SCK (Master mode): Clear TRISC<3>
- SCK (Slave mode): Set TRISC<3>
- SS: Set TRISC<4>
The MSSP module uses four registers in SPI mode:
- SSPCON: Control register
- SSPSTAT: Status register
- SSPBUF: Data buffer register
- SSPSR: Shift register (not directly accessible)
Master and Slave Modes
In Master mode, the SPI initiates data transfer when you write data to SSPBUF, which generates the SCK signal and shifts out the data. The maximum data transfer rate at 40 MHz reaches 10 Mbps.
In Slave mode, the device transmits and receives data using external clock pulses on SCK, with the SS pin providing synchronization. The device can also wake from Sleep mode upon receiving data.
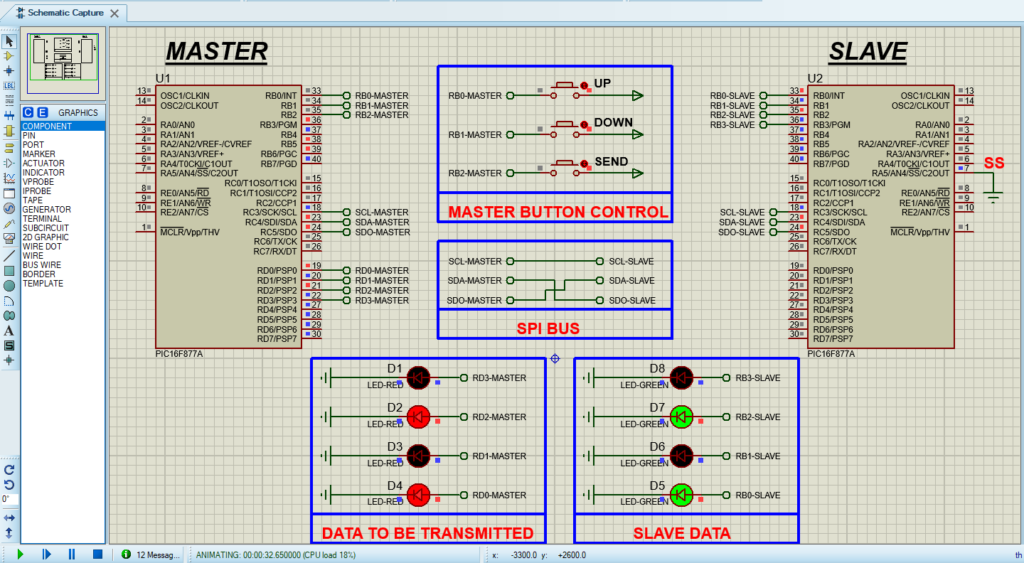
Proteus Configuration :
- Open Proteus & Create New Project and click next

- Click on Pick Device
- Search for PIC16F877A & LED-RED & LED-GREEN & BUTTON
1 comment
[…] how to interface the TC72 digital temperature sensor with a PIC microcontroller using the SPI protocol. The system reads temperature data from the TC72 and transmits it over UART for monitoring. […]