
Table of Contents
PIC16F877 PWM (Pulse Width Modulation) is a powerful technique for controlling LEDs and other devices in embedded systems. By varying the duty cycle of a PIC16F877 PWM signal, developers can precisely control the brightness, color, and behavior of LEDs. This technique is essential for applications requiring smooth dimming, variable brightness, or color mixing in RGB LEDs.
What is PIC16F877 PWM?
PIC16F877 PWM reduces the average power delivered by an electrical signal by chopping it into discrete parts. The two main parameters of PIC16F877 PWM are frequency and duty cycle. Frequency dictates how fast the PWM signal switches between on and off states, while the duty cycle indicates the proportion of time the signal remains on within each cycle.
How PIC16F877 PWM Works
PIC16F877 PWM operates by switching the power supply on and off at a high frequency. When the power stays on longer than it is off, the total power supplied to the device increases. This method allows for precise control over power output, making it ideal for applications such as dimming LEDs, controlling motor speeds, and generating audio signals.
Key Benefits
- Smooth Dimming: PWM enables smooth transitions in LED brightness, avoiding the flicker that simpler on/off control methods can cause.
- Energy Efficiency: PWM reduces power consumption by adjusting the average power delivered to the LED, making it efficient for battery-powered devices.
- Color Control: In RGB LEDs, PWM facilitates precise control over each color channel, allowing the creation of millions of colors by varying the duty cycles of the red, green, and blue LEDs.
Applications of PWM
- LED Dimming: Adjusting the duty cycle with PWM can control LED brightness, creating smooth dimming effects.
- Motor Control: PWM is widely used in motor speed control, providing efficient and precise power regulation.
- Power Regulation: PWM regulates voltage and current in power supplies, ensuring stable output for electronic devices.
- Signal Generation: PWM can generate audio signals and other waveforms, which are useful in various communication and control systems.
PWM-Based LED Control
To utilize PWM for LED control, configure a microcontroller’s timer module to generate a PWM signal with a specific frequency and duty cycle. The duty cycle determines the proportion of time the LED is turned on within each cycle, directly influencing its brightness.
Implementation Considerations
- Timer Configuration: Select the appropriate timer module and configure it for PWM mode. Set the desired PWM frequency and duty cycle to achieve the intended LED behavior.
- Resolution: The resolution of the PWM signal, determined by the timer’s bit width, affects the granularity of the duty cycle adjustment. Higher resolution allows for finer control over LED brightness.
- Frequency Selection: The PWM frequency must be high enough to avoid visible flicker in LEDs but not so high that it exceeds the microcontroller’s capabilities or affects power efficiency.
Proteus Configuration :
- Open Proteus & Create New Project and click next

- Click on Pick Device
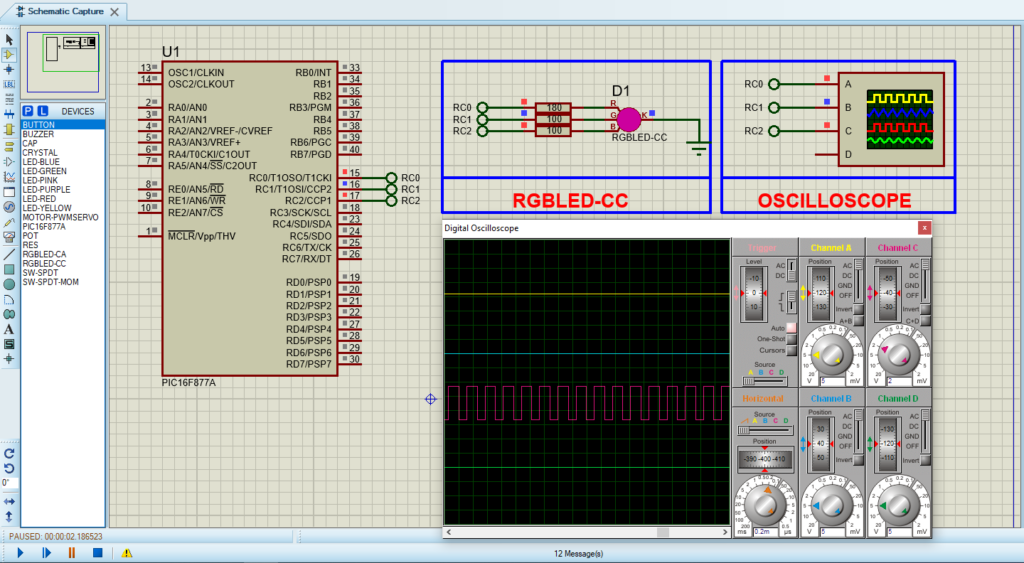
- Search for PIC16F877A & RGB
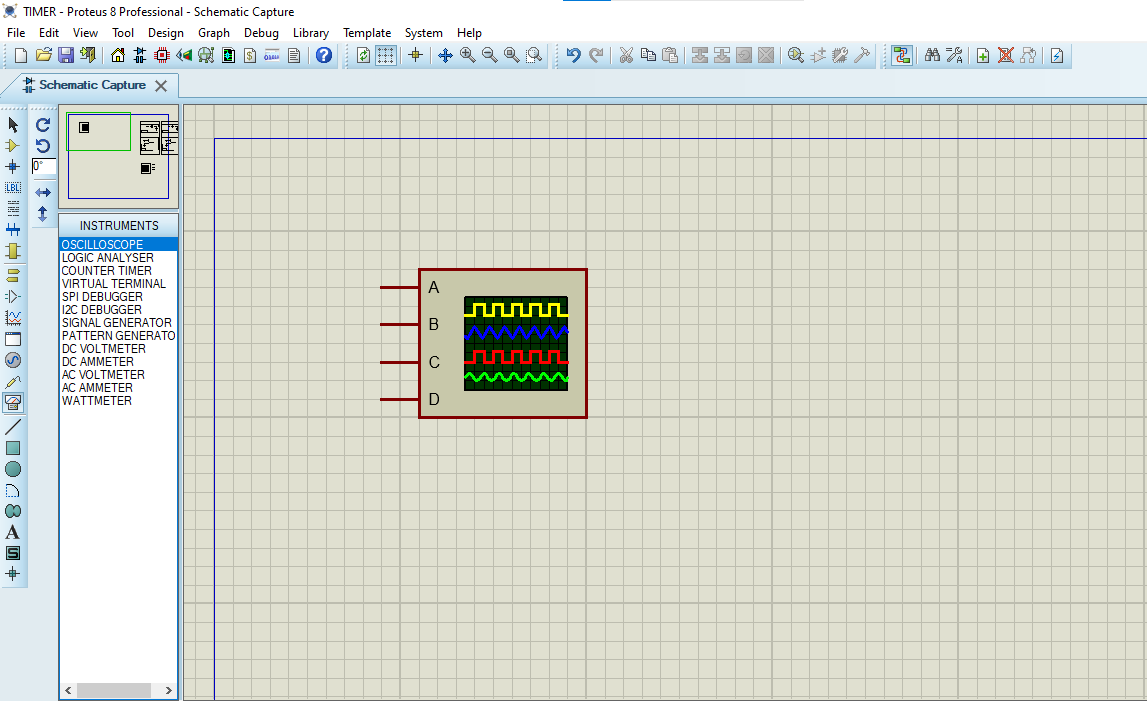
- Click on Virtual Instruments Mode then choose OSCILLOSCOPE
1 comment
[…] various modes of (CCP) Capture/Compare/PWM modules, especially within the PIC16F877 Capture and Compare Mode, play a critical role in timing […]