Table of Contents
Understanding GPIO Pins:
GPIO pins, short for General Purpose Input/Output pins, are the backbone of microcontroller operations. These pins enable versatile interfacing with external components, which is especially useful when working with PIC16F877 Microcontroller I/O GPIO Ports. In most cases, the pins on a microcontroller act as GPIOs, facilitating essential input/output operations.
Specialized Pins on the PIC16F877:
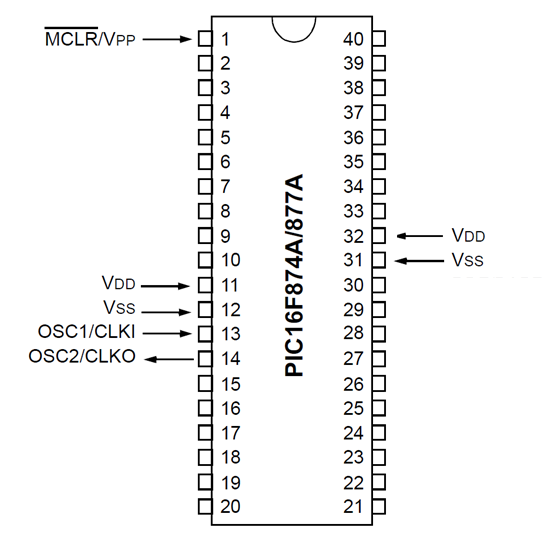
Apart from GPIO pins, the PIC16F877 has several specialized pins:
- Power Supply pins: Vdd & Vss
- Oscillator pins: OSC1 & OSC2, providingthe necessary clock input.
- MCLR/VPP: Master Clear Reset pin,facilitating deliberate MCU restart.
- VUSB: External USB power source pin.
Organizing GPIO Pins into Ports:
Typically, most microcontroller pins are organized into ports, as described in the PIC16F877A datasheet. Each port consists of multiple pins, often grouped into 8-bit ports, though this can vary across different microcontrollers.
For example, in the PIC16F877A:
- PORTA: 6 pins (RA0 to RA5)
- PORTB: 8 pins (RB0 to RB7)
- PORTC: 8 pins
- PORTD: 8 pins
- PORTE: 3 pins (RE0 to RE2)
How Digital Input/Output Ports Operate:
Digital input/output ports in microcontrollers, including PORTB, are managed by two essential registers:
- TRISx Register: This register determines whether each pin functions as an input or an output.
- PORTx Register:This register is responsible for reading the state of input pins or setting the state of output pins.
For instance, with PORTA, you would use TRISA and PORTA; for PORTB, it would be TRISB and PORTB. The key actions involved in manipulating an I/O port include configuration and read/write operations.
Configuring I/O Pins:
To configure the PIC16F877 Microcontroller I/O GPIO Ports:
- Setting a bit to 1 (High) in the TRISx register designates the corresponding pin as an input.
- Setting a bit to 0 (Low) in the TRISx register designates the corresponding pin as an output.
To configure all pins of a port simultaneously, follow the same principles.

In C programming, several methods manipulate bits and registers, including:
- Register Overwriting Method

- Bit-Masking Method

- Bit-Fields Method (recommended for XC8 users)

Reading and Writing Digital I/O Pins:
Once you’ve configured an I/O pin, you gain the ability to either read its state (if configured as an input) or alter its logical state (if configured as an output). The PORTx register serves as a linchpin in this process, with the value written to it dictating the logical state of the corresponding pins (High: 1/Low: 0).
Writing to PORTx Register:
When you write a 1 (High) to a bit of the PORTx register, you effectively set the corresponding pin to High. Conversely, writing a 0 (Low) to a bit of the PORTx register sets the corresponding pin to Low.
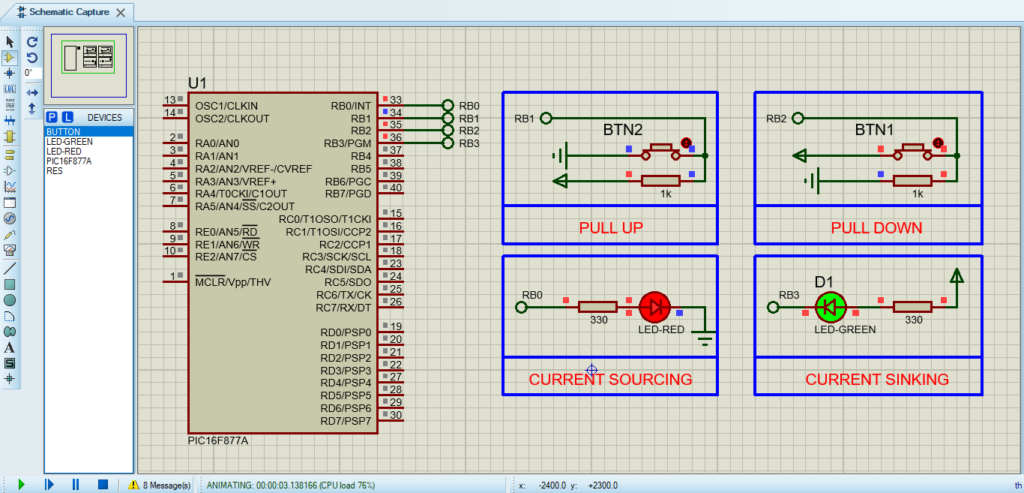
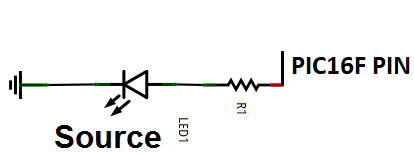
Output Pins Current Sourcing Configuration:
When configured in this manner, the output pin acts as a (+5v) source, supplying current to drive small loads (e.g., LEDs, Transistors, Relays, Optocouplers, etc.). A typical pin in our microcontroller can source up to 25 mA for each I/O pin.
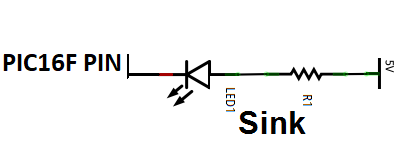
Output Pins Current Sinking Configuration:
Conversely, in the sinking configuration, the output pin functions as a (0v or Ground) sink, drawing current from small loads (e.g., LEDs, Transistors, Relays, Optocouplers, etc.). Similar to sourcing, a typical pin in our microcontroller can sink up to 25 mA for each I/O pin.
Reading Input Pins:
To read the logical state of an input pin accurately, additional hardware connections are necessary to ensure stable system behavior. Leaving an I/O pin unconnected while using it as an input should be avoided, as it leads to inconsistent input. To mitigate this, input pins are commonly pulled-up or pulled-down.
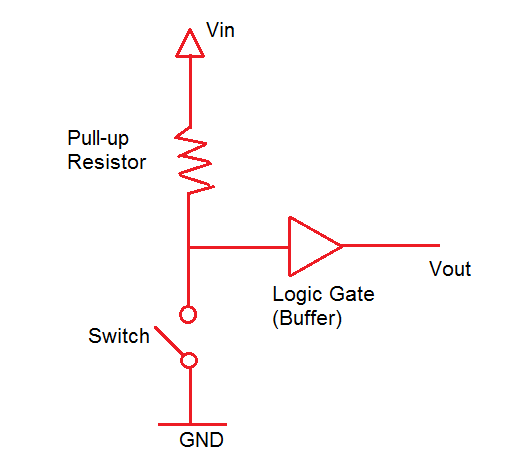
Input Pins Pull-Up Configuration:
In this configuration, the pin is consistently pulled-up to High (logic 1) until an event drives it Low (to 0). Typically, a 10kohm resistor is connected between the input pin and Vdd (+5v).
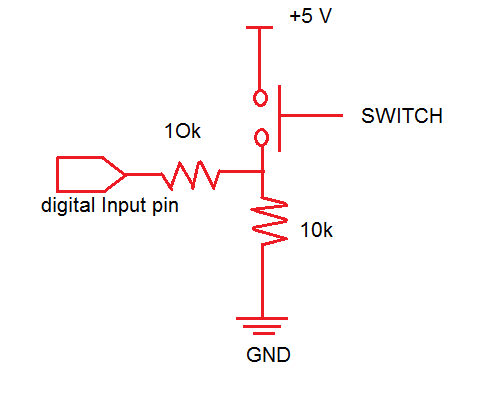
Input Pins Pull-Down Configuration:
Contrarily, in this setup, the pin is continuously pulled-down to Low (logic 0) until an event drives it High (to 1). Here, a 10kohm resistor is connected between the input pin and Vss (0v or Gnd).
Proteus Configuration :
- Open Proteus & Create New Project and click next

- Click on Pick Device
- Search for STM32F103C6 & BUTTON & LED-RED & LED GREEN