
Table of Contents
Introduction to I2C Communication:
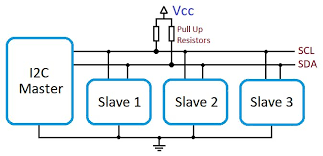
I2C (Inter-Integrated Circuit) is a widely used, multi-master, multi-slave, synchronous, bidirectional, half-duplex serial communication bus. Philips Semiconductors (now NXP) originally developed I2C in 1982. Some microcontrollers, like those from Atmel AVR, refer to it as Two-Wire Interface (TWI). This protocol operates with just two lines: the serial data line (SDA) and the serial clock line (SCL).
What is I2C?
I2C facilitates communication between multiple devices using only two lines, making data transfer and device management efficient. It uses open-drain (or open-collector) output drivers, requiring both the SDA and SCL lines to be set as inputs. Because these lines remain in high-impedance mode when not driven, I2C ensures reliable communication.
Key Features of the I2C Busl:
- Two Bus Lines: Requires only two lines—SDA and SCL.
- Addressable Devices: Each device connected to the bus is software-addressable by a unique address, supporting master-slave communication.
- Multi-Master Capability: Supports multiple masters with collision detection and arbitration to prevent data corruption.
- Data Transfer Rates:
- Standard-mode: Up to 100 kbit/s
- Fast-mode: Up to 400 kbit/s
- Fast-mode Plus: Up to 1 Mbit/s
- High-speed mode: Up to 3.4 Mbit/s
- Ultra Fast-mode (unidirectional): Up to 5 Mbit/s
- Spike Filtering: On-chip filtering rejects spikes on the bus data line, preserving data integrity.
- Bus Capacitance: The number of ICs connected to the same bus is limited only by maximum bus capacitance, with higher capacitance allowed under certain conditions.
I2C Protocol Overviewl:
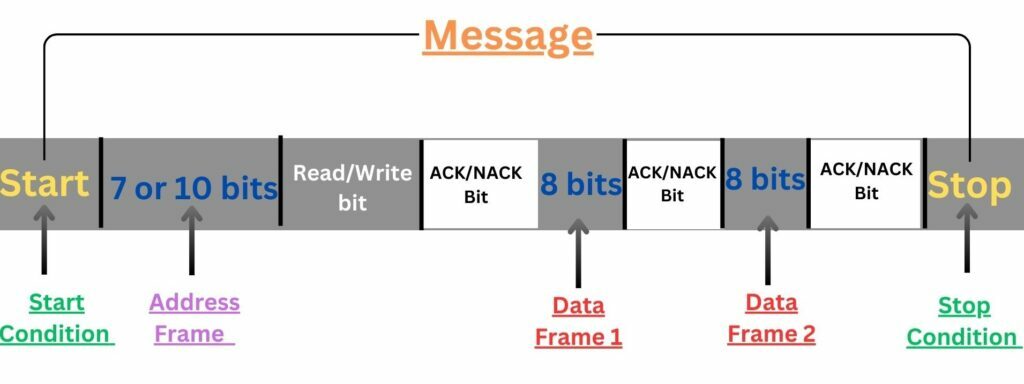
The I2C protocol operates based on several critical conditions, including start and stop conditions, address transmission, data transfer, and acknowledgment signals.
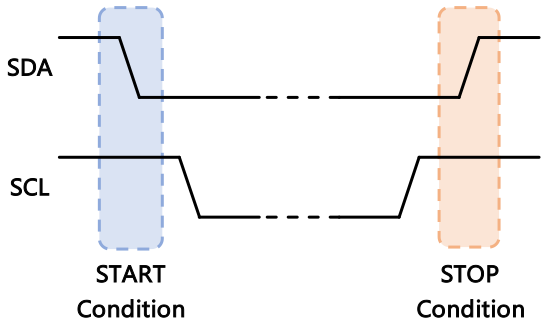
Start and Stop Conditions
- Start Condition (S): A high-to-low transition on the SDA line while SCL is high.
- Stop Condition (P): A low-to-high transition on the SDA line while SCL is high.
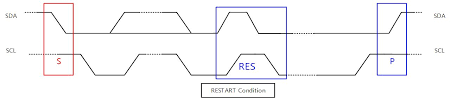
- Repeated Start Condition (Sr): Used to maintain control of the bus without releasing it.
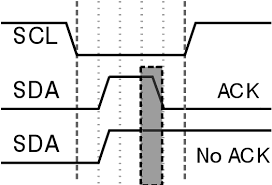
Acknowledge (ACK) and Not Acknowledge (NACK)
- ACK: Indicates successful receipt of a byte, where the receiver pulls the SDA line low during the acknowledge clock pulse.
- NACK: Indicates unsuccessful receipt or inability to receive further data, where the SDA line remains high during the acknowledge clock pulse.
Byte Format and Clock Synchronization
Every byte transmitted on the I2C bus contains eight bits, followed by an ACK bit. Data is transmitted with the most significant bit (MSB) first. The master manages clock synchronization and arbitration to handle multiple masters communicating simultaneously.
Advanced Features:
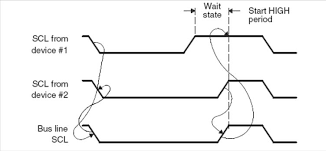
- Clock Stretching: Slave devices can hold the SCL line low to pause the master, providing additional time to process data. This feature is essential for devices with limited processing power or memory.
- Addressing and Direction Control: I2C supports both 7-bit and 10-bit addressing modes. During data transfer, the slave address is followed by a direction bit (R/W) that indicates whether the master intends to read or write.
Arbitration and Bus Management
I2C arbitration ensures that when multiple masters try to communicate simultaneously, only one master controls the bus. To manage this, each master monitors the SDA line and yields control if it detects a mismatch between the expected and actual bus state.
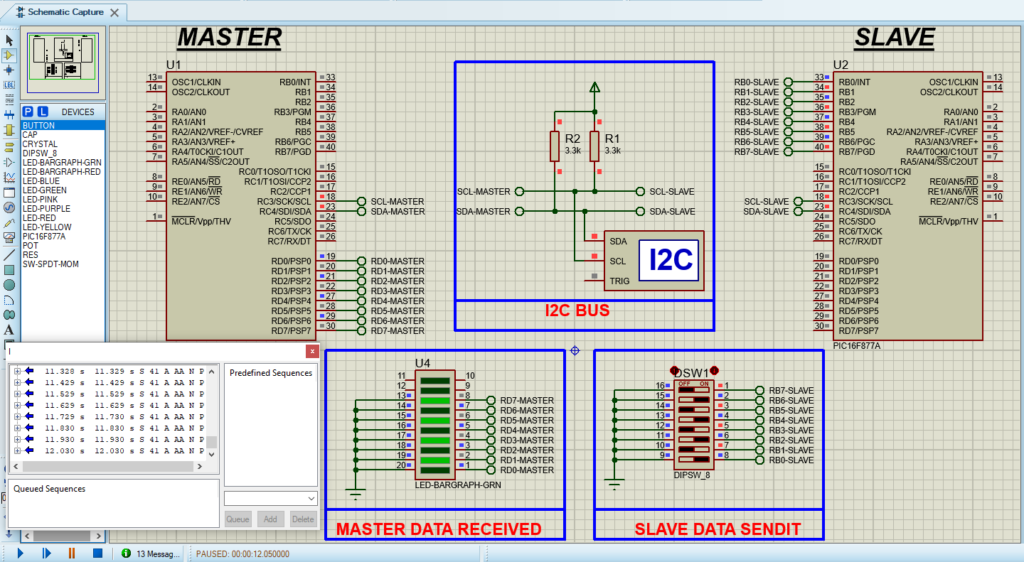
Proteus Configuration :
- Open Proteus & Create New Project and click next

- Click on Pick Device
- Search for PIC16F877A & LED-BARGRAPH-GRN & DIPSW_8

3 comments
[…] project demonstrates how to interface the LM75 temperature sensor with a PIC microcontroller using I2C communication. The system reads real-time temperature data, which is displayed over UART. Different […]
[…] project interfaces the TCN75A temperature sensor with a PIC microcontroller via I²C communication. It continuously monitors temperature and transmits data through UART. The system […]
[…] how to interface the FDC1004 capacitance-to-digital converter with a PIC microcontroller using the I2C communication protocol. The system reads capacitance data from the FDC1004 and displays it on an […]