Table of Contents
In the realm of electronics, the PIC16F877 DAC (Digital-to-Analog Converter) is an essential component that bridges the digital world with the analog domain. By converting digital data (composed of 0s and 1s) into an analog signal, the PIC16F877 DAC enables the generation of continuous analog waveforms from digital information. Functionally, DACs, including the PIC16F877 DAC, perform the inverse operation of analog-to-digital converters (ADCs), and they are significantly more cost-effective.
The Role and Importance of DACs:
The PIC16F877 DAC is ubiquitous in various electronic systems, including audio/music players, video players, televisions, and other devices that require analog signal generation from digital sources
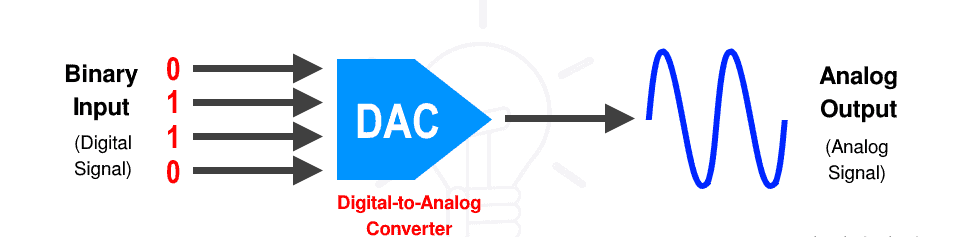
The fundamental need for DACs arises from the digital nature of modern computers, which store, process, and output data in digital form. To interact with the analog world—such as playing back audio or controlling analog actuators—DACs are indispensable.
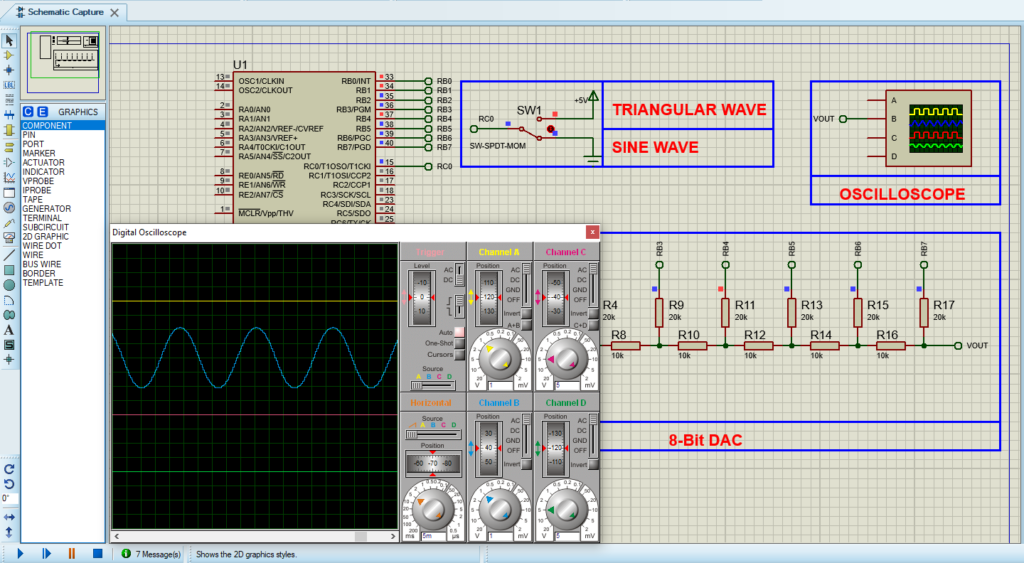
Proteus Configuration :
- Open Proteus & Create New Project and click next

- Click on Pick Device
- Search for PIC16F877A & RES & SWITCH
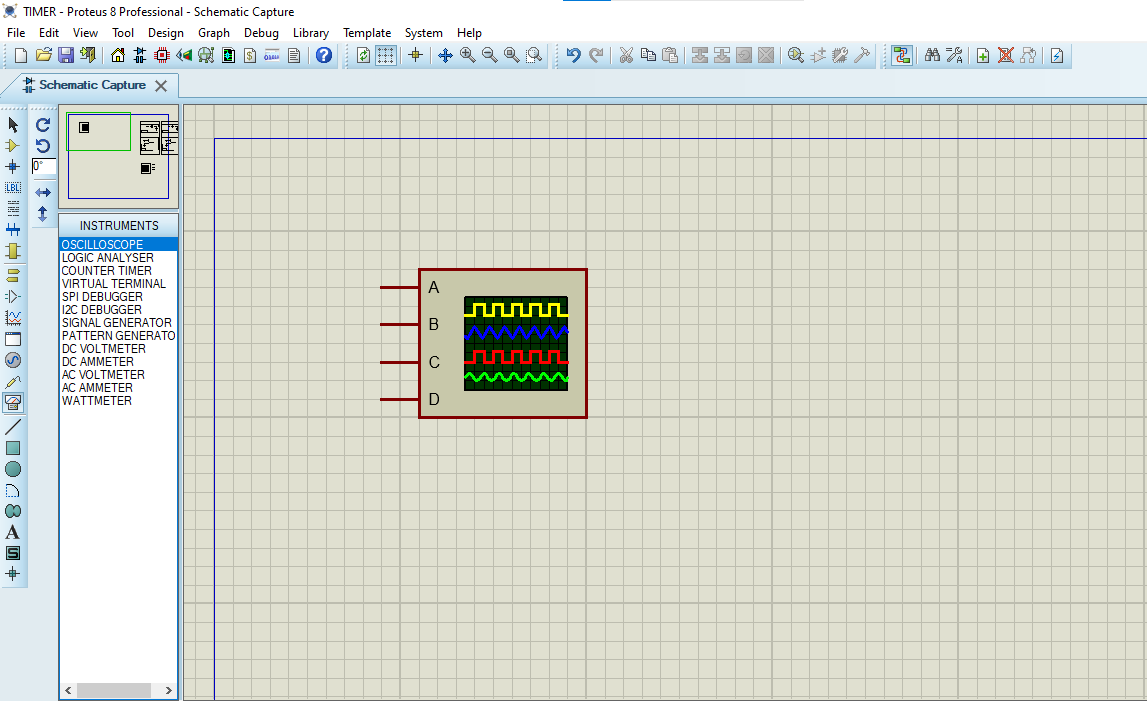
- Click on Virtual Instruments Mode then choose OSCILLOSCOPE
- Click on Terminal Mode then choose (DEFAULT & POWER &GROUND)